












TetherIA.ai 成立于 2025 年初,是一家位于硅谷的全栈机器人公司,专注于打造下一代通用灵巧手 (Dexterous Hand) 平台。公司由 Tesla Optimus 灵巧手核心成员与 Waymo 基座大模型早期团队成员共同创立,凭借复合型团队背景及“ 硬件+AI” 的深度整合优势,已构建起涵盖机械结构、驱动控制、数据与算法的端到端创新能力。

创始人陶一伟 (Evan) 曾任 Tesla Optimus 灵巧手负责人,带领团队完成了特斯拉第二代灵巧手的研发,并全程参与了从工程设计、量产落地到机器人大模型早期研发与部署的全流程。在加入特斯拉之前,他曾就职于苹果,担任 Vision Pro 机械结构设计负责人。联合创始人董旭 (Joe) 曾任小鹏 AI 规划技术负责人,完成了小鹏智驾端到端研发,更早之前作为 Waymo 基座模型核心创始成员,在 AI 及自动驾驶领域发表多篇 CVPR 等顶会论文。
目前,Tetheria 核心团队由 15 名工程师组成,均位于硅谷。团队成员多毕业于斯坦福、UC Berckley、康奈尔、卡耐基梅隆等在 AI 与具身智能领域顶尖高校,并曾就职于特斯拉、Waymo、苹果、小鹏等知名企业,在机器人控制、机械设计及 AI 领域具备丰富经验。

TetherIA 的首款产品已完成前期研发和软硬件适配,具体参数尚未公开。据悉,该产品为一款类人手五指灵巧手,采用以绳驱为主的混合方案,具备高自由度、人手尺寸、轻量化、模块化及可靠耐用等特性。在硬件层面,该款产品有望成为市面上最轻、最小的高自由度灵巧手;在软件层面,则针对遥操作等使用场景,提供 AI Copilot 软件和 Sim-2-Real 工具链,为具身智能算法的实际落地提供支持。该产品将主要面向美国市场。
此外,创始团队表示,为推动机器人社区加速操作算法训练,团队研发了一款极低成本、高实用性的全开源灵巧手,预计售价在 300 美元左右,将成为业内性能最优的开源灵巧手。上述高自由度灵巧手和全开源灵巧手,将于 2025 年 9 月 27 日至 30 日在韩国首尔 COEX 会展中心举办的机器学习大会 (Conference on Robot Learning,CoRL) 上正式发布,届时还将展示实时 AI 控制算法,展示公司灵巧手在抓取不同大小尺寸、不同薄厚程度、不同形状物体方面的通用能力。全开源灵巧手将在 CoRL 后开放订购,并即刻可以开始交付,高自由度灵巧手预计年底前完成开发、明年年初交付。

图:工具使用能力展示

图:细小物体抓取能力展示
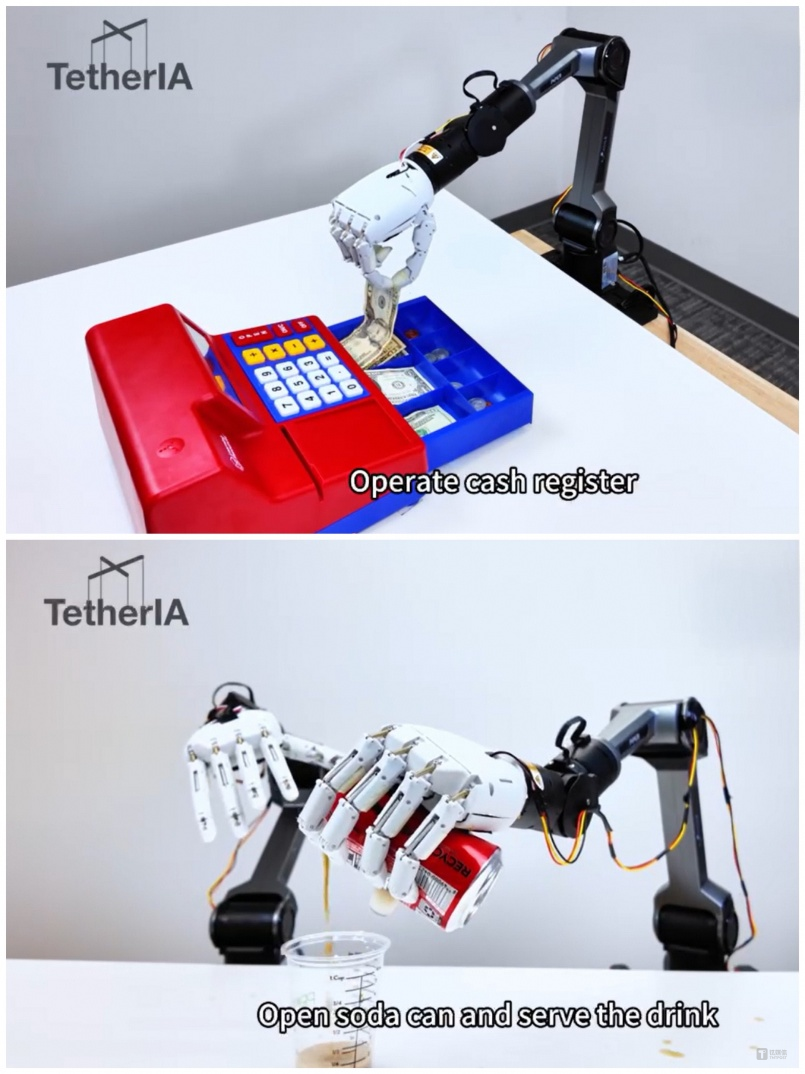
图:连续复杂任务能力
随着全球柔性自动化需求持续增长,灵巧手已成为物流分拣、协作机器人、精密装配及家用服务机器人的核心组件。据高工机器人产业研究院 (GGII) 统计,预计到 2035 年,全球人形机器人销量将达到 500 万台,市场规模有望突破 4000 亿美元,其中灵巧手占整机 BOM 成本约 25-30%。TetherIA 凭借软硬件一体化的优势,可为客户提供即插即用的高灵活度解决方案,凭借其灵巧手高灵活度、高出力、高集成度等特性,适用于线束整理、螺丝锁付等高复杂度、高精度及长时间持续出力的多元场景,并能广泛适配各类机械臂,加速机器人在更多实际场景中落地,开拓百亿美元级的潜在市场。
经纬创投投资董事童倜表示:“ 灵巧手是具身智能重要的 Tier 1 零部件,且高度影响具身智能的落地进度。我们同时相信灵巧手的未来是软硬件结合的商业模式,需要高管团队具有完整的软硬件能力。TetherIA 团队具有完整的灵巧手研发及量产经验,以及满足行业趋势的研发能力。我们很高兴能作为早期投资人支持公司,祝公司首款产品顺利量产。”
更多精彩内容,关注钛媒体微信号 (ID:taimeiti),或者下载钛媒体 App










